![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
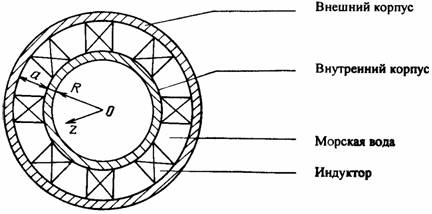
4.1. МГД–движители индукционного типаВ последние годы проявляется научный и технический интерес к проблеме применения на крупнотоннажных морских судах и больших подводных лодках движителей магнитогидродинамического типа. В первую очередь это объясняется ухудшением экономических и массогабаритных показателей гребных винтов при переходе на повышенные скорости. При создании МГД–движителей используются те же принципы, которые лежат в основе работы кондукционных и индукционных насосов. Разрабатываются также МГД–движители, не имеющие прямых аналогов с электромагнитными насосами. По сравнению с гребными винтами МГД–движители имеют следующие преимущества: непосредственное использование электроэнергии судна для создания тяги, пониженные уровни вибраций и гидродинамических шумов. При больших мощностях атомных энергетических установок и использовании МГД–генераторов для преобразования тепловой энергии реактора в электрическую массогабаритные показатели гребных электрических двигателей оказываются неудовлетворительными. Поэтому альтернативой такому положению может явиться применение магнитогидродинамических движителей. Примером такого двигателя может служить схема, разработанная применительно к большой подводной лодке и представленная на рис. 4.1. Индукторы, создающие бегущее магнитное поле от носа к корме подводной лодки, расположены между внешним и внутренним корпусами лодки.
Рис. 4.1 В морской воде между корпусами лодки будут индуцироваться токи, замыкающиеся по окружностям, параллельным корпусу лодки. Взаимодействие индуцированных в морской воде токов с магнитным полем приводит к появлению электромагнитных сил, направленных в сторону кормы лодки. Сумма всех пондеромоторных сил создает тяговый упор и лодка приходит в движение. Длина подводной лодки существенно больше ее поперечных размеров и задача сводится в математическом плане к рассмотрению бесконечно длинного цилиндра с бегущим магнитным полем, нормальная составляющая которого на поверхности цилиндра направлена по радиусу и может быть задана в виде
где Вт
– максимальное значение индукции; w1
– угловая частота; Линейная скорость
поля равна Из уравнения индукции (1.7)
получаем уравнение
так как если учитывать только осевую компоненту скорости и нормальную составляющую индукции
По порядку
величины отношение левой части уравнения (2.10) к правой равно
Уравнение (2.12) теперь имеет вид
Опуская для краткости дальнейшие достаточно не простые выкладки решения уравнения в цилиндрических координатах, запишем окончательное выражение для электромагнитной силы упора
если предположить
Силу сопротивления движению подводной лодки можно представить в виде
где cс = 0,05 – коэффициент сопротивления; v – скорость лодки; S – площадь поперечного сечения корпуса лодки. При L =
200 м, а = 5 м, S =75 м2,
С учетом джоулевых потерь КПД приближенно равен
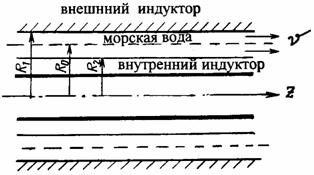
Расчеты показывают, что такая схема мало рациональна, так как приемлемый коэффициент полезного действия может быть получен только при малой скорости хода, а размеры индукторов очень велики. Более рациональной представляется схема индукционного движителя каналового типа, представленная на рис. 4.2. В этой схеме можно получить больший КПД и большие индукции. Расчеты показывают, что при тех же габаритах лодки и скорости около 10 узлов КПД составит ок. 10%
Рис. 4.2
|
|