![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
Лабораторная работа №3
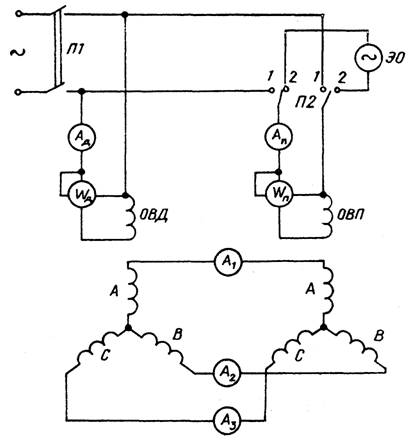
Пояснения и указания к работе Перед началом работы следует ознакомиться с конструкцией и паспортными данными сельсинов и изучить схему испытательного стенда (рис. 3.1).
Рис. 3.1. Схема для исследования сельсинов
При исследовании работы сельсинов в индикаторном режиме их обмотки возбуждения подключены к сети переменного тока на номинальное напряжение (переключатель П2 па рис. 3.1 в положении 1). Перед снятием кривой погрешностей ∆α=f(αд) необходимо путем поворота корпуса приемника установить стрелку приемника на нуль шкалы при нулевом положении датчика. Затем поворотом ротора датчика задаются углы αд от 0 до 360° (через каждые 10°) и измеряются углы поворота ротора приемника αп. Погрешность системы характеризуется разностью между показаниями датчика приемника ∆α=αд—αп. Точность сельсинов определяется как среднее арифметическое значение максимальной положительной и максимальной отрицательной погрешности. В зависимости от значения погрешности индикаторные сельсины-приемники разделяются на четыре класса точности: I класс имеет погрешность до 30'; II — от 30' до 45'; III — от 45' до 60'; IV — от 60' до 90'. Удельным синхронизирующим моментом сельсина-приемника называется момент, приходящийся на 1° угла рассогласования. Для его измерения на валу ротора-приемника укреплен шкив радиусом 2,5 см. При помощи нити, накрученной на шкив, и подвешенного к ней груза ротор приемника выводится из согласованного положения. Стрелка приемника показывает угол рассогласования. Произведение массы груза на радиус шкива определяет синхронизирующий момент. Удельный синхронизирующий момент находится делением рассчитанного момента на измеренный угол рассогласования. Для определения времени успокоения сельсина-приемника сельсины устанавливаются в согласованное положение. Ротор датчика закрепляется. Напряжение питания выключается. Стрелка приемника устанавливается на угол 179°. Затем систему включают на номинальное напряжение и одновременно запускают секундомер. Время, в течение которого ротор приемника колеблется, приходя в согласованное положение, называется временем успокоения сельсина-приемника. При определении критического угла рассогласования приемника с его вала снимается внешний механический демпфер. Ротор датчика закрепляется в нулевом положении. Поворотом стрелки приемника задается некоторый угол рассогласования (примерно 2°). Затем стрелку отпускают и ротор приемника, совершив несколько колебаний, приходит в согласованное положение. Увеличивая угол рассогласования, находят такой режим, когда колебания ротора носят незатухающий характер. Минимальный угол рассогласования, при котором ротор приемника, будучи отпущен, не успокаивается, а начинает вращаться, называется критическим углом рассогласования. Останавливать вращающийся ротор следует путем выключения питания. Не допускается работа сельсина в режиме асинхронного вращения, т. к. это вызывает перегрев обмоток и износ подшипников. После проведения опыта демпфер необходимо поставить на место. Снятие зависимостей синхронизирующего момента, токов и мощностей от угла рассогласования начинают с нулевого (согласованного) положения сельсинов. Затем с помощью шкива и нити с грузом задается угол рассогласования от 0 до 180° через каждые 15—20°, и производится запись показаний приборов и значения момента. При определении максимального момента, имеющего место при угле рассогласования α=90°, а также при снятии кривой момента после ее прохождения через максимум необходимо двумя пальцами руки ограничивать разбег стрелки. Рекомендуется при одном и том же грузе снимать показания в устойчивой зоне угловой характеристики 0≤α<900 и неустойчивой зоне 90° < α≤180°, переводя стрелку пальцами руки в положение 180°—αi, где αi — показания стрелки в устойчивой зоне. Во избежание чрезмерного перегревания сельсинов все испытания следует проводить быстро, особенно при углах рассогласования α>30°. При исследовании работы сельсинов в трансформаторном режиме обмотка возбуждения приемника отключается от питающей сети и подключается к осциллографу (переключатель П2 на рис. 3.1 в положении 2). В реальных схемах эта обмотка, являясь выходной обмоткой, подключена через усилитель мощности к обмотке управления исполнительного двигателя. Для определения остаточного напряжения ротор приемника, при фиксированном нулевом положении ротора датчика, поворачивают до тех пор, пока осциллограф, подключенный к выходной обмотке, не покажет минимального напряжения. В этом положении ротора датчика с помощью вольтметра измеряется остаточное напряжение. Для определения ошибки асимметрии ротор датчика и ротор приемника со стрелкой устанавливают в нулевое положение и, поворачивая корпус приемника, фиксируют его в положении, при котором выходное напряжение минимально. Затем ротор приемника поворачивают на 180°. Если сельсин не имеет асимметрии, то в этом положении ротора выходное напряжение снова будет минимальным. При наличии асимметрии ротор приходится поворачивать на некоторый угол в ту или иную сторону от 180°, с тем, чтобы добиться минимального напряжения. Значение этого угла и является ошибкой асимметрии. Для снятия кривой погрешностей сельсинов в трансформаторном режиме ротор датчика устанавливают на нуль шкалы, а ротор приемника фиксируют в положении, при котором нулевому положению стрелки соответствует минимальное выходное напряжение. Такое положение сельсинов называется согласованным. Затем ротор датчика поворачивают на 20° и снова фиксируют. Пальцами руки стрелку приемника вращают вместе с ротором приемника в ту же сторону, что и ротор датчика, на угол, при котором на выходной обмотке наблюдается минимальное напряжение. Разница между 20° и данным углом дает погрешность сельсина-приемника. В общем случае погрешность сельсина-приемника ∆α=αд—αп. Повторяя описанную процедуру через каждые 20° в диапазоне от 0 до 360°, получают зависимость погрешности от угла поворота датчика. Для более точного определения погрешности минимум выходного напряжения следует фиксировать при помощи осциллографа. Точность сельсина-приемника определяется полу суммой абсолютных значений максимальной положительной и максимальной отрицательной погрешностей. В зависимости от значения погрешности приемника трансформаторные сельсины делятся на семь классов точности: I — ±1'; II —±2'; III — ±3'; IV — ±5'; V — ±10'; VI — ±20'; VII — ±30'. При определении зависимостей выходного напряжения, токов в линиях связи, мощности и тока, потребляемых обмоткой возбуждения датчика, от угла рассогласования ротора сельсинов устанавливают в нулевое положение и записывают первое показание приборов. Затем ротор датчика, при фиксированном нулевом положении ротора приемника, поворачивают на 10°, 20° и далее до 360° через каждые 10° и в каждом из этих положений записывают показания приборов. После окончания экспериментов необходимо определить удельное выходное напряжение, как частное от деления выходного напряжения при угле рассогласования 10° на 10: Uвых.уд = Uвых·10° /10. |
|