Лабораторная работа № 3
Исследование переходных процессов в асинхронном двигателе
c короткозамкнутым ротором при моделировании в осях
a,b
Методические указания к пункту 1
Для исследования асинхронных двигателей с симметричными обмотками удобна система ортогональных координат a,b, неподвижных относительно статора [1]. Уравнения равновесия напряжений обобщенной машины записываются при этом в следующем виде:
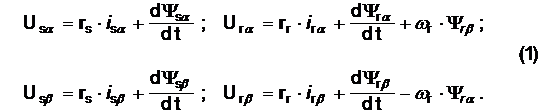
В уравнения входят полные потокосцепления обмоток статора и ротора,
которые складываются из потокосцеплений самоиндукции и взаимоиндукции:

Система уравнений (1) может быть решена относительно потокосцеплений,
если входящие в нее токи выразить через потокосцепления по формулам:
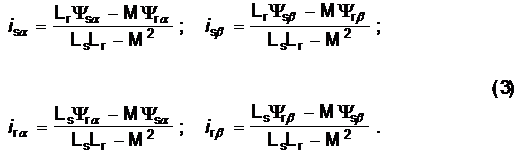
Система уравнений, в которой искомыми переменными являются
потокосцепления, наиболее устойчива и удобна для интегрирования. Токи
при необходимости можно для любого режима определить из алгебраических
уравнений (3).
Так как для машины с короткозамкнутым ротором
Usa=Um×COSωt; Usb=Um×SINωt; Ura=Urb=0.
то уравнения имеют вид:
![]()
![]()

![]()
Здесь
ω=2πf
- угловая частота напряжения сети.
На ротор асинхронного двигателя в общем случае действует сумма
моментов, определяющая закон изменения его скорости вращения во
времени. В эту сумму входят:
![]()
Здесь J - сумма момента инерции ротора двигателя и приведенного момента инерции нагрузочного механизма;
p - число пар полюсов двигателя.Отметим, что частота вращения ротора в геометрических радианах в секунду ω2 связана с ωr соотношением ω2=ωr/p. По ω2 можно найти частоту вращения n (об/мин), если воспользоваться формулой
![]()
2) Демпфирующий момент, равный
![]()
где B - коэффициент
демпфирования. Этот момент в асинхронном двигателе физически обычно
эквивалентен моменту трения (моменту механических потерь). Момент
трения в подшипниках может составлять значительную долю от
номинального момента в машинах малой мощности. При моделировании
асинхронных двигателей средней и большой мощности приближенно можно
считать, что момент трения равен 1% от номинального момента Mн
при номинальной частоте
вращения
ωrн:
![]()
Большинство асинхронных двигателей имеет вентилятор на валу. Так как
вентиляторный момент (как и момент трения ротора о воздух) является
квадратичной функцией частоты вращения и не велик по сравнению с
другими слагаемыми в уравнении момента, будем считать при моделировании,
что оба момента учитываются в результирующем моменте трения (6).
3) Момент нагрузки Mc. В общем случае Mc может быть произвольной функцией времени, которая должна быть задана. В данной работе предусмотрен лишь постоянный момент Mc.
4) Электромагнитный момент двигателя Mэ. Как было отмечено выше, момент трения (механических потерь) входит в уравнение моментов в виде отдельного слагаемого. Поэтому вращающий момент асинхронного двигателя можно считать равным электромагнитному. Последний определяется через мгновенные значения потокосцеплений, найденных в результате решения уравнений (4). Уравнение электромагнитного момента для асинхронного двигателя (Н×м) имеет вид:
![]()
(7)
Запишем уравнение моментов асинхронного двигателя:
![]()
(8)
или
![]() (9)
(9)
Уравнения (4) совместно с уравнением (9) образуют полную систему дифференциальных уравнений асинхронного двигателя с короткозамкнутым ротором.
Активные сопротивления rs и rr в дифференциальных уравнениях не отличаются от сопротивлений фаз статора и ротора, входящих в схему замещения для установившегося режима, т.е. при рабочей температуре берется rs=r1, rr=r2
Уравнения, представленные выше, одинаково справедливы как для действительных, так и для приведенных переменных и параметров ротора. Если ротор приводится к статору, то в уравнениях должны стоять только приведенные величины ротора.
Взаимная индуктивность M связана с индуктивным сопротивлением взаимоиндукции X12 в схеме замещения:
M=X12/ω.
(10)
Полные индуктивности фаз обмоток статора и ротора определяются суммой потокосцеплений с рабочим потоком и потоком рассеяния. Поэтому:
Ls=(X12+X1)/ω;
Lr=(X12+X2’)/ω.
(11)
Здесь X1, X2’
- индуктивные сопротивления рассеяния из схемы замещения асинхронного
двигателя.
В данной лабораторной работе исследуется модель серийного трехфазного
асинхронного двигателя с короткозамкнутым ротором типа А42-6 со
следующими номинальными данными: 1,7 кВт; 220/380 В; 7,5/4,3 А; 930
об/мин. Машина имеет кратность пускового тока 4,5; кратность пускового
момента 1,4; кратность максимального момента 1,8.
Параметры двигателя при рабочей температуре 75°C равны:
rsα=rsβ=3,57
Ом - активное сопротивление обмотки статора по осям
α
и
β;
rrα=rrβ=3,8
Ом - приведенное активное сопротивление обмотки ротора по осям
α
и
β;
Lsα=Lsβ=0,2787
Гн - полные индуктивности обмотки статора по осям
α
и
β;
Lrα=Lrβ=0,2892
Гн - полные индуктивности обмотки ротора по осям
α
и
β;
M=0,2628 Гн - взаимная
индуктивность;
J=1,491 Н×м×с2
- кинетический момент инерции;
p=3 - число пар полюсов;
m=3 - число фаз;
Mн=11,87 Н×м - номинальный момент.
Обратимся теперь к способам решения системы дифференциальных
уравнений.
Полная система уравнений (4) и (9) может быть записана в общем виде как
![]() (12)
(12)
Для успешного решения системы обыкновенных дифференциальных уравнений
первого порядка (12) необходимо задать начальные условия X(t0)=X0.
При этом предполагается, что решение задачи для этих начальных условий
существует и хорошо определено для всех моментов времени t>t0.
В нашем случае необходимо задание в момент времени t0
величин потокосцеплений обмоток
Ysα(t0),
Ysβ(t0),
Yrα(t0)
и
Yrβ(t0),
а также угловой скорости вращения ротора
ωr(t0).
Для нахождения X(t) численным методом весь интервал времени решения T
делят на небольшие приращения времени. Каждое приращение времени hi=(Δt)i
называют величиной шага. Целью численного интегрирования является
нахождение функции X(t) в каждой точке разбиения интервала времени T.
Большинство методов решения подобной задачи, называемой задачей Коши,
базируется на двух основных подходах: разложение в ряд Тейлора и
полиномиальная аппроксимация. Методы, основанные на разложении в ряд
Тейлора, обычно называют методами Рунге-Кутта. Методы, основанные на
полиномиальной аппроксимации, обычно называют методами численного
интегрирования [2].
Для достижения достаточно высокой точности при относительно большой
величине шага наиболее широко используется метод Рунге-Кутта четвертого
порядка. Он задается следующими выражениями:
Xn+1=Xn+h×K4(Xn,tn,h),
(13)
где
K4(Xn,tn,h)=1/6×[k1+2k2+2k3+k4];
k1=f(Xn,tn);
k2=f(Xn+h/2×k1,tn+h/2);
(14)
k3=f(Xn+h/2×k2,tn+h/2);
k4=f(Xn+h×k3,tn+h).
Этот метод реализован в известной подпрограмме RKGS. Эта подпрограмма самостоятельно осуществляет интегрирование на заданном интервале. Пользователь должен лишь обеспечить расчет правой части системы дифференциальных уравнений. При этом существенно усложняется процесс управления ходом расчета и оперативного вмешательства в него.