Круговую диаграмму строят
в прямоугольной системе координат. По оси ординат направляют вектор номинального
напряжения U1н.
Под углом < φ0 к оси ординат откладывают в масштабе ток холостого
хода I0
(вектор О А) и под углом φк — ток короткого замыкания
IKH75
(вектор
OG)
(рис. 2.2).
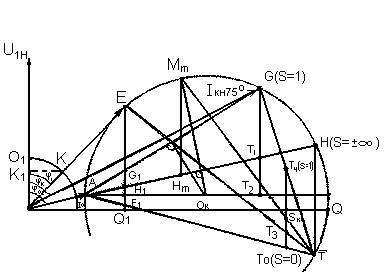
Рис. 2.2. Круговая диаграмма асинхронного двигателя.
Соединяют точки
A
и G.
К середине отрезка AG
восстанавливают перпендикуляр и продолжают его до
пересечения в точке Ок с горизонталью, проведенной из точки
А. Точка Ок будет являться центром круговой диаграммы.
Проводят окружность, проходящую через точки А и
G,
с центром в точке Ок.
Далее опускают перпендикуляр из точки
G
на диаметр окружности получают точку
T2;
отрезок GT2
делят в отношении

где R175
— активное сопротивление фазы
обмотки статора (указано на стенде), пересчитанное для температуры 75°С;
R275'=RК75—R175
— активное сопротивление фазы обмотки
ротора, приведенное к виткам фазы статора, при
t =
75°C.
Через точки А и 7, проводят прямую до пересечения с
окружностью в точке Н, в которой скольжение
s=
± ∞.
В круговой диаграмме линии
AG, АН
и
OQ
имеют следующие названия:
AG
— линия механической мощности (для двигателя это
полезная мощность на валу Р2);
АН — линия
электромагнитной мощности Р12 и электромагнитного момента
М;
OQ —
линия электрической мощности (для двигателя это потребляемая мощность из сети
Р1 ).
Для определения значений М, Р1
, Р2,
cosφ1
,
η,
s,
n2
при номинальном токе статора
I1H
из точки О делают засечку отрезком
OE=I1H/µI
. Из точки E
опускают перпендикуляр на ось абсцисс и получают
точку Q1.
Отрезки, отсекаемые на EQ1
линиями механической, электромагнитной и потребляемой мощности, в масштабе
мощности соответственно равны Р2 ,
P12
и
P1
.
Мощность на валу двигателя, кВт;
P2
=
µрEG1,
где µp
=3 U1Hф
µ1 10-3
— масштаб мощности, кВт/мм.
Электромагнитная мощность, кВт:
P12
=
µрEH1
Потребляемая двигателем мощность из сети, кВт:
P1
=
µрEQ1
Момент на валу двигателя Н·м:
M
=µmEH1,
где

— масштаб момента, (Н∙м)/мм. Здесь
n1
= 60ƒ1/p
— синхронная частота вращения, об/мин; р — число пар полюсов двигателя; ƒ1
— частота тока сети, Гц; U1Hф
— номинальное фазное напряжение. Длина
всех отрезков берется в мм. Для определения скольжения строится шкала
скольжений.
Для этого из точки Н проводится вертикальная линия до
пересечения с окружностью в точке Т; точку Т соединяют лучами с
точками А и G.
Затем проводят шкалу скольжения Т0Т4 ,
параллельно ТН на таком удалении от ТН, чтобы отрезок
T0T4,
удобно делился на 10 равных частей; в
точке Т0 s
= 0, в точке Т4
s=1.
Чтобы найти скольжение, соответствующее точке Е
круговой диаграммы, нужно соединить ее с точкой Т; тогда линия ТЕ
отсечет отрезок Т0Т3. Скольжение в точке Е
(в относительных единицах) будет равно
s =
T0T3/T0T4.
Значение частоты вращения ротора вычисляется по формуле
n1=
n1(1—
s)
.
Для определения коэффициента мощности строится шкала
cosφ1:
проводится 1/4 вспомогательной окружности радиусом 4—5 см с центром в
точке О. Радиус ОО1, совпадающий с осью ординат, и будет шкалой
cosφ1:
в точке О cosφ1=0,
в точке O1
cosφ1=1.
Вспомогательная окружность пересекает вектор тока ОЕ в точке
K,
тогда проекция отрезка ОК на ось ординат
OK1
= cosφ1.
КПД двигателя рассчитывается по формуле:
Более точно можно определить кпд косвенным методом (см.
работу № 1).
Потери в двигателе, кВт, выражаются следующими отрезками:
– электрические потери в обмотке статора
PM1
= µрH1F1
;
– электрические потери в обмотке ротора
PM2
= µрG1H1
;
– потери в стали Pст
= µрF1Q1
.
|
 |
